Grid Map¶
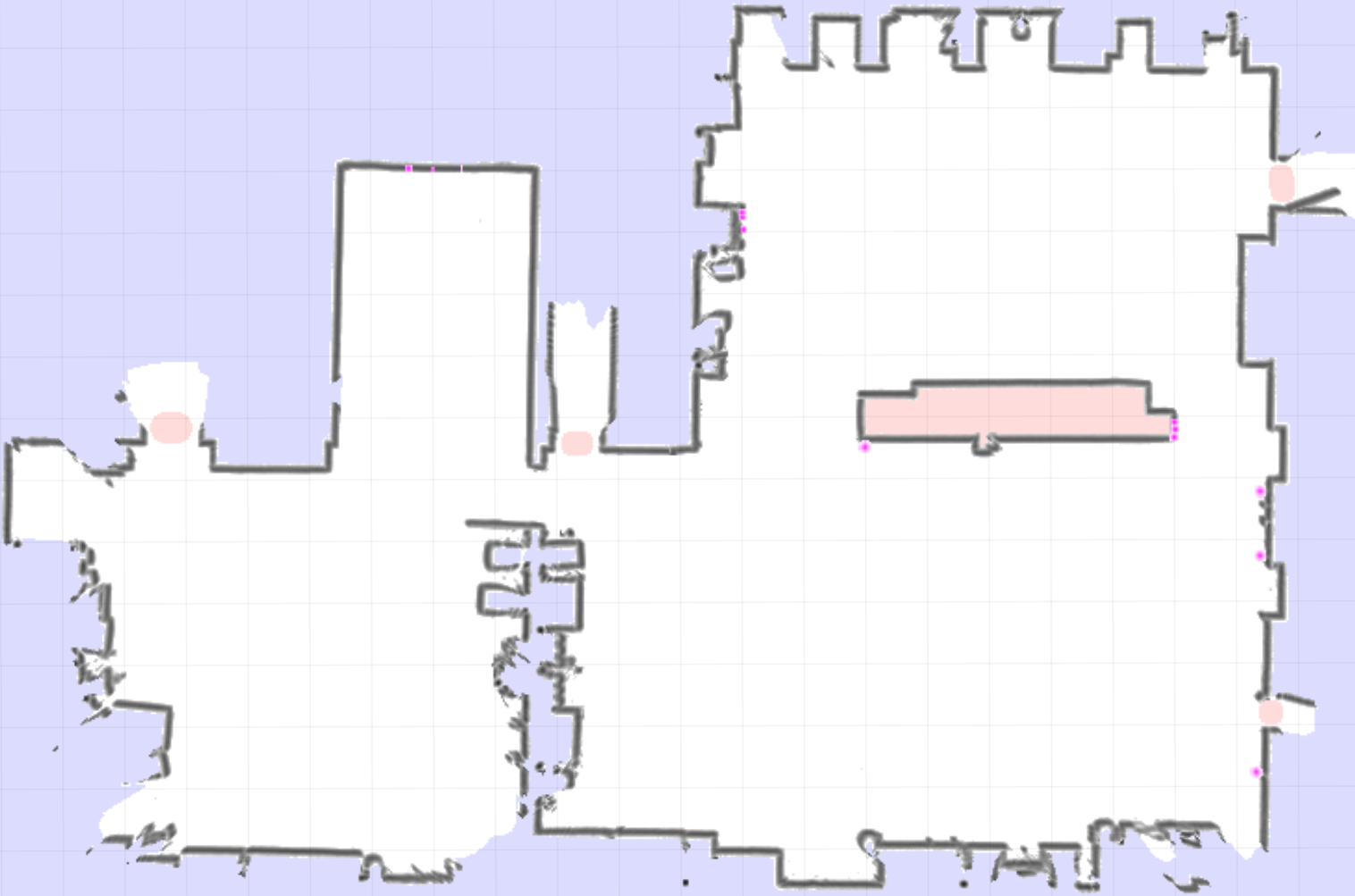
The Grid Map is an image representing an occupancy grid map, created via a SLAM mapping algorithm. It has two layers: normal occupancy and reflector occupancy, both consisting of 8-bit data per pixel / cell.
See also: pilot.GridMapData, pilot.OccupancyMapData