

Arm¶
Properties of the Universal Robots Arms¶
The UR robot arm has not been modified. All features and properties of the arm remain unchanged as stated in the manufacturer’s documentation. Please refer to this documentation for further information.
The platform’s emergency stop system was integrated into the arm’s safety system as external machine. Technical details on this connection can be found in the electrical circuit diagram of the MMO-500 and in the operating instructions of the robot arm. In case the arm is to be operated separately this connection has to be bridged with the Harting connector that was included in delivery. Please see the following chapter for details.
Tip
The configurable inputs CI0 and CI1 have been changed to “Unassigned”.
The configurable outputs CO0 and CO1 have been set to “Emergency stop”.
The safety configuration password was set to neobotix.
Please contact Neobotix if you have any questions concerning the safety system.
Standalone Operation¶
The mobile platform can be operated without switching on the arm or completely without arm. To do so please plug in the bridging connector -X31 instead of the cable to the UR arm controller. This connector can be found at the front left of the platform’s top plate.
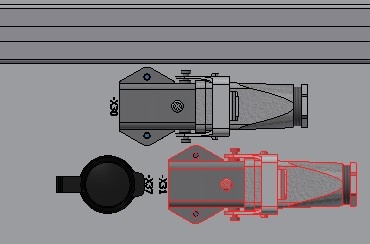
Connector -X31
The robot arm can be operated independently of the mobile platform if the corresponding bridging connector -X31 is connected to the cable leading to the controller box.
Additionally another connector has to be replaced inside the controller box to make the safety system of the arm independent of the platform’s power supply. This grey bridging connector replaces the green one required for combined operation.
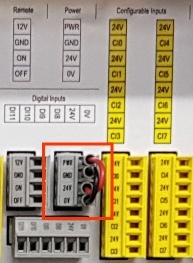
Power Connector for Standalone Operation
When operating the arm without the platform it is recommended to power it from an ordinary 230V power outlet and not from the mobile robot’s integrated DC/AC inverter.
Please check the robot arm’s operating instructions for details on the power requirements.