

Konfiguration¶
Der komfortabelste Weg, die Antriebsverstärker zu konfigurieren und zu optimieren ist über die Software Composer, die zum freien Download auf der Homepage von Elmo MC bereit steht. Die aktuellste Version finden Sie unter:
https://www.elmomc.com/product/composer/
Es ist empfehlenswert, den Rechner, auf dem der Composer läuft, über eine serielle RS-232-Verbindung mit dem Verstärker zu verbinden. Das entsprechende Kabel kann auf Anfrage bereitgestellt werden.
Die Werkseinstellungen der Module sind für die meisten Anwendungsfälle geeignet und sofort betriebsbereit. Bei einer Ansteuerung per CAN-Bus müssen lediglich die CAN-IDs der einzelnen Achsen entsprechend der verwendeten Steuerungssoftware eingestellt werden.
Falls außergewöhnliche Kinematiken realisiert werden sollen oder die Module unter extremen Bedingungen (sehr hohe Last, unebener oder weicher Boden, außermittiger Schwerpunkt und ähnliches) eingesetzt werden sollen, müssen unter Umständen die Reglerparameter anders eingestellt werden. Bitte wenden Sie sich in einem solchen Fall an Neobotix.
Verbindung zu den Antriebsverstärkern aufbauen¶
Nach dem Start des Composers erscheint der Startdialog. Verbinden Sie Rechner und Antriebsverstärker mit dem Konfigurationskabel und schalten Sie die Spannungsversorgung ein.
Bemerkung
Bitte achten Sie darauf, den Rechner auch tatsächlich mit dem Verstärker zu verbinden, auf den Sie gerade zugreifen wollen.
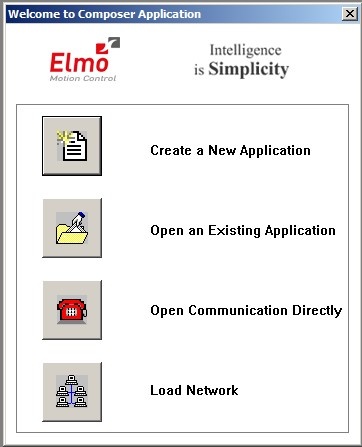
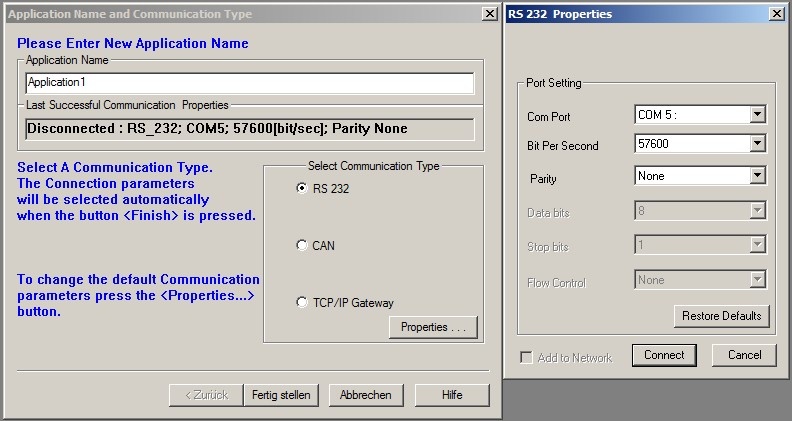
Wählen Sie Open Communication Directly um den Dialog zur Einstellung der Verbindungsparameter aufzurufen. Wählen Sie dort RS 232 als Schnittstelle und klicken Sie auf Properties. Im nächsten Dialog können Sie den verwendeten COM-Port und die auf den Verstärkern voreingestellte Datenrate (57600 Bit Per Second) wählen und dann auf Connect klicken. Der Dialog wird geschlossen und das Konfigurationsfenster, genannt Smart Terminal, erscheint.
Falls keine Verbindung aufgebaut wird, prüfen Sie bitte die folgenden Punkte:
- Spannungsversorgung: Ist der Verstärker an eine geeignete Stromquelle angeschlossen und ist diese eingeschaltet? Falls das Modul an ein Labornetzteil angeschlossen ist: ist die Strombegrenzung hoch genug, um den Einschaltstrom und einen ausreichend schnellen Spannungsanstieg der Logikversorgung zuzulassen?
- Kabel: Ist der Rechner mit dem richtigen Verstärker verbunden? Wenn an mehreren Modulen nacheinander gearbeitet wird passiert es oft, dass zum Beispiel nur die Spannungsversorgung an das nächste Modul angeschlossen wurde, der Rechner aber noch nicht.
- Datenrate: Die Verstärker wurden auf eine Datenrate von 57,6 kBaud eingestellt, beim ersten Start des Composers sind dort jedoch nur 19,2 kBaud eingestellt.
- COM-Port: Probieren Sie die anderen Ports aus. Wenn Sie einen USB-zu-Seriell-Konverter verwenden, prüfen Sie, welcher Port diesem gerade zugewiesen wurde. Schließen Sie gegebenenfalls den Composer, verbinden Sie den Konverter erneut und versuchen Sie es dann noch einmal.
Über die Schaltfläche Disconnect rechts unter dem Hauptmenü kann die Verbindung zum Verstärker getrennt werden:

Mit verschiedenen Konfigurationen arbeiten¶
Es gibt verschiedenen Möglichkeiten zur Arbeit mit Konfigurationen.

Die Schaltflächen zum Neu-Anlegen, Öffnen und Speichern von Konfigurationen (v.l.n.r.)
Die aktuelle Konfiguration speichern¶
Nachdem eine Verbindung zu einem Verstärker aufgebaut wurde, wird dessen aktuelle Konfiguration sofort in den Composer geladen und kann dann über die Schaltfläche Save Application in der oberen linken Ecke des Programmfensters lokal gespeichert werden. Dabei werden Sie immer gefragt, ob die Konfiguration auch im nicht-flüchtigen Speicher des Verstärkers abgelegt werden oder auf dem Rechner gespeichert werden soll.
Der Speichern-Unter-Dialog erscheint immer. Falls die Konfiguration in der aktuellen Sitzung bereits gespeichert wurde, wird automatisch der dafür verwendete Dateiname eingesetzt. Leider wird dieser ebenso automatisch um die Angabe der gerade verwendeten Schnittstelle ergänzt. Um doppelte Dateien zu vermeiden, sollten Sie daher den richtigen Dateinamen immer manuell angeben.
Alle Änderungen in der Konfiguration können auch in den nicht-flüchtigen Speicher des Verstärkers geschrieben werden, ohne dass dabei eine Datei auf dem Rechner angelegt wird. Geben Sie einfach den Befehl „sv“ in die Kommandozeile des Smart Terminals ein und drücken Sie die Eingabetaste oder klicken Sie auf Send.
Eine existierende Datei aufspielen¶
Um eine Sicherheitskopie einer Konfiguration zu verwenden klicken Sie auf die Schaltfläche Open Existing Application, wählen die Datei aus und klicken auf Download. Falls sich die aktuelle Kommunikationsschnittstelle von der in der Datei gespeicherten unterscheidet, müssen Sie die Einstellungen erst entsprechend anpassen. Der Dialog dazu erscheint nach einem Klick auf Change im Bereich Communication Info area des Datei-Auswahldialogs.
Nach dem Verbindungsaufbau wird die Konfiguration automatisch in den flüchtigen Speicher des Verstärkers heruntergeladen. Sie kann dann, wie im vorigen Kapitel geschrieben, gespeichert werden.
Die motorspezifischen Kommutierungsparameter sind ebenfalls Teil der Konfiguration. Dadurch ist es möglich, jeden bereits bekannten Motor an jedem Verstärker zu betreiben, indem einfach die passende Konfiguration aufgespielt wird. Es bedeutet aber auch, dass die Kommutierung für jeden neuen Motor neu bestimmt werden muss, auch wenn sich keine anderen Einstellungen ändern. Bitte sprechen Sie uns an, wenn Sie einen Motor tauschen möchten.
Eine neue Konfiguration anlegen¶
Alle Antriebsparameter können über einen geführten Dialog neu eingestellt werden. Da die OmniDriveModules nicht für andere Motoren ausgelegt sind, ist dies jedoch nicht zu empfehlen.
Bitte wenden Sie sich gegebenenfalls an Neobotix, wenn Sie die Module grundlegend verändern möchten.
Grundeinstellungen¶
Das Smart Terminal des Composers zeigt alle Parameter, die ohne großen Aufwand angepasst werden können. Falls Sie andere Einstellungen ändern möchten oder tiefer gehende Informationen benötigen, verwenden Sie bitte die Dokumentation auf der Elmo MC Homepage oder wenden Sie sich direkt an Elmo MC oder Neobotix.
Die Kommunikationsparameter können über die Kommandozeile oben links verändert werden. Geben Sie den Befehl „PP“ und den passenden Index in eckigen Klammer ein und drücken Sie die Eingabetaste oder klicken Sie auf Enter, um den aktuellen Wert auszulesen. Hängen Sie zusätzlich ein Gleichheitszeichen und den neuen Wert an, um den Parameter zu überschreiben.
Die folgenden Befehle werden häufig benötigt:
| Kommando | Beschreibung | Gebräuchliche Werte |
|---|---|---|
| PP[2] | RS-232-Datenrate | 4: 57600 Baud (Werkseinstellung) |
| 3: 38400 Baud | ||
| 2: 19000 Baud | ||
| PP[13] | CAN ID | 1-8 |
| PP[14] | CAN-Datenrate | 0: 1000 kBaud (Werkseinstellung) |
| 1: 500 kBaud | ||
| 2: 250 kBaud | ||
| PP[15] | CAN Gruppen-ID | 1 – 128 (Default: 30) |
Fortgeschrittene Einstellungen¶
Für einige der Einstellungen ist es nötig, dass der Motor deaktiviert ist. Verwenden Sie dazu die Schaltfläche Stop & Motor Off.

Beschleunigung und Verzögerung¶
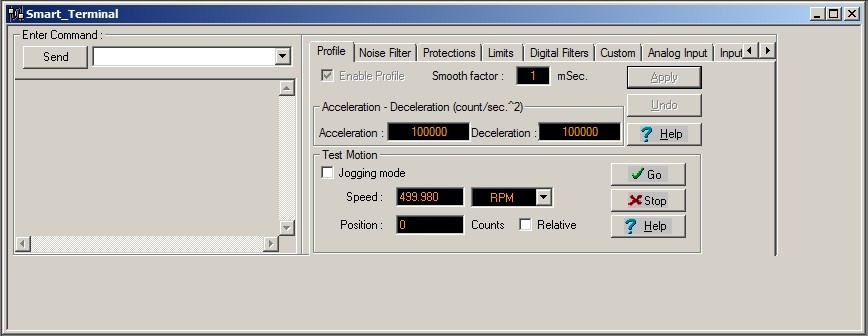
Die maximal zulässigen Beschleunigungs- und Verzögerungswerte können in den entsprechenden Feldern des Reiters Profile im Smart Terminal angegeben und durch einen Klick auf Apply übertragen werden. Bei ihnen handelt es sich um die Grenzwerte, die vom internen Regler des Verstärkers verwendet werden. Die resultierenden Beschleunigungen im realen Betrieb werden hauptsächlich durch die Einstellungen der übergeordneten Steuerungssoftware bestimmt und sollten deutlich geringer gesetzt werden.
Geschwindigkeitsbegrenzungen und Not-Stopp¶
Auf dem Reiter Velocity (innerhalb des Reiters Limits) können mehrere Geschwindigkeitsgrenzen eingestellt werden. Die Command-Angaben definieren die akzeptablen Geschwindigkeitsvorgaben, Bewegungsbefehle mit Geschwindigkeiten außerhalb dieser Grenzen werden verworfen.
Die Feedback-Angaben definieren den Bereich, in dem sich der Motor bewegen darf, ohne dass die Bewegung als Fehler interpretiert wird. Sie sollten folglich etwas größer sein als die Command-Werte.
Mit Stop deceleration wird die Verzögerung angegeben, die vom Verstärker verwendet wird, um den Motor bei einem harten Stopp-Befehl anzuhalten. Sie kann höher sein als die normale Verzögerung und soll das möglichst schnelle aber gleichzeitig sichere Anhalten der Achse bei einem Notfall garantieren.
Reglerparameter¶
Die Parameter der internen Regelschleifen können auf dem Reiter Digital Filters verändert werden.
Die Werte der Stromregelschleife (Current) sollten nicht manuell verändert werden.
Im unwahrscheinlichen Fall, dass das Fahrverhalten der OmniDriveModules nicht den Anforderungen der jeweiligen Anwendung genügt, können die Reglerparameter vorsichtig angepasst werden. Bitte wenden Sie sich vorher unbedingt an Elmo Motion Control.
Tests und Fehlerbeseitigung¶
Im Bereich Test Motion des Reiters Profile kann der Motor für Testzwecke unter manueller Kontrolle bewegt werden. Setzen Sie gegebenenfalls den Haken bei Jogging mode um den Motor kontinuierlich mit der bei Speed angegebenen Geschwindigkeit drehen zu lassen. Ohne den Haken bewegt sich der Motor zu der angegebenen Position. Klicken Sie auf Go, um die Bewegung zu starten, und auf Stop, um sie anzuhalten.
Mit dem Composer lassen sich auch hoch aufgelöste Messungen der Motorbewegung und einiger anderer Parameter erstellen und graphisch darstellen. Bitte wenden Sie sich an Elmo MC oder Neobotix, wenn Sie nähere Informationen zu diesem Thema benötigen.