

Elektrische Anschlüsse¶
Energieversorgung¶
Motoren und Logik¶
Beide Antriebsverstärkers eines Moduls sind an die selbe Versorgung angeschlossen. Verwenden Sie die folgenden Komponenten für den elektrischen Anschluss:
- Stecker: Würth Elektronik, Serie 351 WR-TBL, 691 351 500 003
- Stecker (alternativ): Phoenix Contact, MSTB 2,5 HC/ 3-ST, 1911868
- Kabel (Last & Masse): H07V-K oder besser, 2,5 mm² oder größer
- Kabel (Logik): H05V-K oder besser, 0,5 mm² oder größer
Die interne Logikeinheit der Antriebsverstärker kann von der Lastspannung unabhängig versorgt werden, so dass bei einem Not-Halt die Verstärker weiter arbeiten, über den CAN-Bus kommunizieren und die Motorposition nicht verlieren.
Tipp
Die OmniDriveModules sind standardmäßig für 24V-Logikversorgung vorbereitet. Bitte wenden Sie sich an Neobotix, wenn Sie andere Spannungen verwenden möchten.
Die Steckerbelegung ist wie folgt:

| Pin | Funktion | Spannung / VDC | Beschreibung |
|---|---|---|---|
| 1 | Gesamtmasse | 0 | Lastspannung, abschalten bei Not-Halt |
| 2 | Gemeinsame Masse | 20 – 59 | Gemeinsame Rückleitung |
| 3 | 24V-Logikversorgung | 11 – 30 | Hilfsspannung, nicht schalten |
Positionsschalter¶
Wenn die Logikeinheit mit 24V versorgt wird, wird der Positionsschalter direkt über die Platine der Antriebsverstärker versorgt. Bei unterschiedlichen Spannungen müssen diese auf eine gemeinsame Masse gelegt werden.
Achtung
Die Masseleitung des Digitaleingangs ist standardmäßig mit der Masse der Stromversorgung verbunden. Bitte sprechen Sie uns an, wenn getrennte Masseanschlüsse erforderlich sein sollten.
Verwenden Sie bei Bedarf die folgenden Komponenten für die Versorgung des Schalters:
- Gehäuse: Würth Elektronik, MPC4, 2-reihig, 2-polig, 649002113322
- Kontakte: Würth Elektronik, MPC4, Crimpkontakte weiblich, 18-24 AWG, 64900613722DEC
Die Steckerbelegung ist wie folgt:
| Pin | Funktion | Spannung / VDC | Beschreibung |
|---|---|---|---|
| 1 | Versorgung | 24 | Versorgungsspannung des Schalters |
| 2 | Masse | 0 | Masseleitung |
Bremsen¶
Die Motoren können optional mit Sicherheitsbremsen bestellt werden, die aktiv gelüftet werden müssen. Die Bremsen arbeiten mit 24V / 0.75A und werden über die Platine der Antriebsverstärker versorgt.
Verwenden Sie die folgenden Komponenten für den Anschluss:
- Gehäuse: Molex, Serie KK Buchsengehäuse, 2-polig, 22-01-2021
- Kontakte: Molex, Serie KK Crimpkontakte, 22-30 AWG, 08-50-0032
Die Steckerbelegung ist wie folgt:
| Pin | Funktion | Spannung / VDC | Beschreibung |
|---|---|---|---|
| Masse | 0 | Masseleitung | |
| Versorgung | 24 | Versorgungsspannung der Bremsen |
Kommunikationsschnittstellen¶
CAN¶
Beide Antriebsverstärker sind mit dem CAN-Anschluss der Trägerplatine verbunden. Bitte verwenden Sie die folgenden Komponenten für den CAN-Bus:
- Gehäuse: TE Connectivity, HE14 Buchsengehäuse, 2-reihig, 8-polig, 281839-4
- Kontakte: TE Connectivity, HE14 Crimpkontakte weiblich, 28-24 AWG, 182734-2
Die Steckerbelegung ist wie folgt:
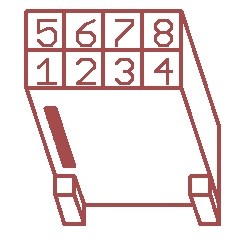
| Pin | Funktion |
|---|---|
| 1,5 | GND |
| 2,6 | CANL |
| 3,7 | CANH |
| 4,8 | Schirm |
Falls der CAN-Bus an einem OmniDriveModule endet, muss er dort mit einem 120 Ω Widerstand terminiert werden. Schieben Sie dazu den Schalter S1 neben den LEDs in Position ON.
RS-232¶
Jeder Antriebsverstärker besitzt eine RS-232-Schnittstelle, die zur Konfiguration und Kommunikation mit der Steuerungssoftware verwendet werden kann.
| Pin | Funktion | Beschreibung |
|---|---|---|
| 1 | GND (Dreh) | Masseleitung (Drehachse) |
| 2 | TxD (Dreh) | Sendeleitung (Drehachse) |
| 3 | RxD (Dreh) | Empfangsleitung (Drehachse) |
| 4 | GND (Fahr) | Masseleitung (Fahrantrieb) |
| 5 | TxD (Fahr) | Sendeleitung (Fahrantrieb) |
| 6 | RxD (Fahr) | Empfangsleitung (Fahrantrieb) |
Digitaleingänge und -ausgänge¶
Die Antriebsverstärker besitzen jeweils sechs digitale Eingänge, zwei digitale Ausgänge und einen Analogeingang, die bei Bedarf für eigene Funktionen verwendet werden können. Die Ein- und Ausgänge können entweder auf vordefinierte Funktionen (Freilauf, Stopp etc.) eingestellt oder durch das auf dem Verstärker laufende Anwenderprogramm genutzt werden. Ihr aktueller Zustand kann außerdem auch per CAN-Bus oder serieller Schnittstelle von der Steuerungssoftware ausgelesen werden.
Die Stecker X2 und X5 erlauben den direkten Zugriff auf jeweils drei digitale Eingänge und einen digitalen Ausgang. Die Eingänge können über Vorwiderstände an Spannungen über 5 V angepasst werden. Die Positionen der Vorwiderstände sind jeweils mit „Rin1“, „Rin2“ und „Rin3“ markiert und befinden sich unmittelbar neben den zugehörigen Steckern.
Bitte beachten Sie, dass die Vorwiderstände gebrückt werden müssen, wenn mit 5V-Signalen gearbeitet werden soll.
Digitaleingang 1 des Antriebsverstärkers der Drehachse ist standardmäßig durch den Ausgang des Positionsschalters belegt und kann nicht für kundenspezifische Anwendungen genutzt werden.
Tipp
Standardmäßig ist die Masseleitung der Digitaleingänge der Drehachse mit der gemeinsamen Masse der Spannungsversorgung verbunden. Bitte sprechen Sie uns an, wenn Sie unabhängige Spannungen benötigen.
Die Masseleitung der Eingänge der Fahrtachse kann ebenfalls mit der gemeinsamen Masse verbunden werden. Brücken Sie dazu einfach den mit „G←I-“ bezeichneten Lötjumper.
An den IO-Steckern sind zusätzlich die Encodersignale der Motoren (ohne Index) herausgeführt. Dadurch kann zum Beispiel eine Stillstandsüberwachung durch externe Sicherheitskomponenten realisiert werden.
Außerdem können über die IO-Stecker auch zusätzliche Sensoren mit geringer Leistungsaufnahme versorgt werden. Die Logikversorgungsspannung der Antriebsverstärker ist an den Anschlüssen „VL“ (Versorgungsspannung) und „G“ (Masse) verfügbar.
Weitere Informationen finden Sie in der Dokumentation zu den Antriebsverstärkern vom Typ „Whistle“ auf der Homepage von Elmo Motion Control.
Bitte verwenden Sie die folgenden Komponenten für die digitalen Ein- und Ausgänge:
- Gehäuse: TE Connectivity, HE14 Buchsengehäuse, 2-reihig, 12-polig, 281839-6
- Kontakte: TE Connectivity, HE14 Crimpkontakte weiblich, 28-24 AWG, 182734-2
| Pin | Funktion | Beschreibung |
|---|---|---|
| 1 | A+ | Kanal A des TTL-Encoders, für Bewegungsüberwachung |
| 2 | B+ | Kanal A des TTL-Encoders, für Bewegungsüberwachung |
| 3 | O- | Emitter-Anschluss des Optokopplers von Digitalausgang 1 |
| 4 | G | Masseanschluss |
| 5 | I- | Gemeinsame Masse der Digitaleingänge |
| 6 | I2 | Digitaleingang 2 (Vorwiderstand beachten) |
| 7 | A- | Kanal A (negiert) des TTL-Encoders, für Bewegungsüberwachung |
| 8 | B- | Kanal B (negiert) des TTL-Encoders, für Bewegungsüberwachung |
| 9 | O1 | Kollektor-Anschluss des Optokopplers von Digitalausgang 1 |
| 10 | VL | Logikspannung (Ausgang) |
| 11 | I1 | Digitaleingang 1 (Vorwiderstand beachten) |
| 12 | I3 | Digitaleingang 3 (Vorwiderstand beachten) |
Bewegungsüberwachung¶
Auf Anfrage können die Stecker so bestückt werden, dass er den Zugang zu den Encoder-Signalen des Fahrantriebs und / oder des Drehantriebs von außen möglich ist.
Die Steckerbelegung ändert sich dann wie folgt.

| Pin | Funktion | Beschreibung |
|---|---|---|
| 1 | O- | Emitter-Anschluss des Optokopplers von Digitalausgang 1 |
| 2 | B+ | Kanal A des TTL-Encoders, für Bewegungsüberwachung |
| 3 | A+ | Kanal A des TTL-Encoders, für Bewegungsüberwachung |
| 4 | O1 | Kollektor-Anschluss des Optokopplers von Digitalausgang 1 |
| 5 | B- | Kanal B (negiert) des TTL-Encoders, für Bewegungsüberwachung |
| 6 | A- | Kanal A (negiert) des TTL-Encoders, für Bewegungsüberwachung |
Für diese Variante benötigen Sie andere Steckergehäuse:
TE Connectivity, HE14 Buchsengehäuse, 2-reihig, 6-polig, 281839-3
Freigabeleitungen¶
Auf Anfrage können die Antriebsverstärker so verschaltet werden, dass sie zwei 24V-Freigabesignale erwarten. Diese können dann zusammen mit dem CAN-Bus in einer gemeinsamen Leitung zu allen Modulen durchgeschleift werden.
Dazu werden die Digitaleingänge 2 und 3 verwendet, die dann für andere Funktionen nicht mehr zur Verfügung stehen.
Achtung
Bitte beachten Sie, dass dies keine Sicherheitsfunktion ist.
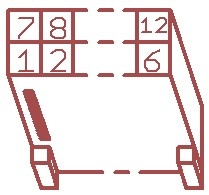
Die Belegung des CAN-Anschlusses ändert sich dann wie folgt:
| Pin | Funktion |
|---|---|
| 1,7 | GND |
| 2,8 | CANL |
| 3,9 | CANH |
| 4,10 | Schirm |
| 5,11 | Freigabe 1 |
| 6,12 | Freigabe 2 |
Für diese Variante benötigen Sie die gleichen Steckergehäuse, wie für die Digital-I/Os.