

Produktbeschreibung¶
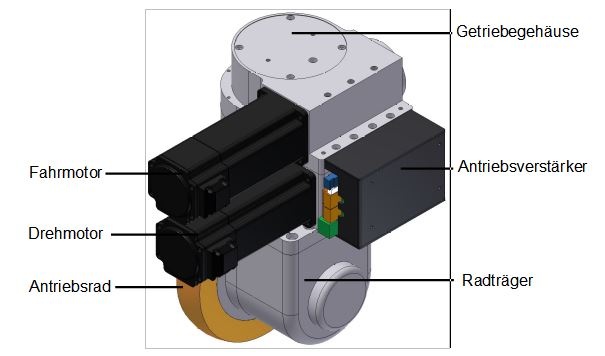
Bei dem Neobotix OmniDriveModule handelt es sich um eine zweiachsige Antriebseinheit für mobile Roboterfahrzeuge und ähnliche Anwendungen.
Das Modul enthält zwei leistungsfähige, bürstenlose Servomotoren mit je einem Servoantriebsverstärker („Whistle 10/60“ von Elmo Motion Control). Beide Verstärker werden über eine gemeinsame Platine versorgt und an den CAN-Bus angeschlossen. Einer der Motoren treibt das Antriebsrad des Moduls, während der andere dessen Ausrichtung um die Hochachse übernimmt. Beide Achsen können endlos drehen und erlauben es einem omnidirektionalen Roboter damit, sich kontinuierlich und ohne Endlagen der Räder zu bewegen. Die Ausrichtung der Drehachse ist durch einen integrierten induktiven Positionsschalter möglich.
Aufgrund der hohen Übersetzungsverhältnisse der Schneckengetriebe sind im allgemeinen keine Bremsen erforderlich. Dadurch können der Energieverbrauch und die Hitzeentwicklung des Moduls signifikant reduziert werden. Beide Motoren können optional mit Sicherheitsbremsen versehen werden, um ein besonders hohes Sicherheitsniveau zu erreichen.
Mögliche Kinematiken¶
Die OmniDriveModules können in verschiedenen Antriebskinematiken eingesetzt werden, um den Anforderungen der jeweiligen Anwendung gerecht zu werden. Dabei hat jede Kinematik ihre eigenen Vor- und Nachteile. Die gebräuchlichsten Varianten sind die folgenden:
1 OmniDriveModule mit 2 Bockrollen¶
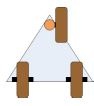
Diese Konfiguration ist kostengünstig und einfach anzusteuern. Die Möglichkeit, dass die Räder bei bestimmten Bewegungen blockieren besteht zwar, ist aber ausgesprochen gering.
Mit dieser Konfiguration sind keine omnidirektionale Bewegungen möglich, da das Fahrzeug immer dem OmniDriveModule folgt.
3 OmniDriveModules¶
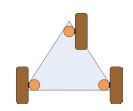
Diese Konfiguration bietet eine hohe Stabilität für kleinere Roboter, ist statisch bestimmt und ermöglicht voll omnidirektionale Bewegungen.
Alle drei Antriebe müssen jederzeit korrekt ausgerichtet sein, um Schlupf und Blockieren zu vermeiden. Außerdem muss der Winkel zwischen den Antriebsrädern immer dem aktuellen Drehpunkt der gesamten Plattform angepasst werden.
4 OmniDriveModules¶
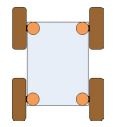
Diese Konfiguration ist die bei Servicerobotern verbreitetste, weil sie auch großen und schweren Robotern eine hohe Stabilität bietet. Ihre statische Überbestimmtheit ist in den meisten Fällen kein Problem, da alle Räder jederzeit aktiv angetrieben werden.
Alle vier Antriebe müssen immer korrekt ausgerichtet sein, um Schlupf und Blockieren zu vermeiden. Außerdem muss der Winkel zwischen den Antriebsrädern immer dem aktuellen Drehpunkt der gesamten Plattform angepasst werden.
Besondere Eigenschaften¶
Separate Logikversorgung¶
Die Antriebsverstärker der OmniDriveModules besitzen einen separaten Anschluss für die Versorgung der Logik. Bei einem Not-Halt kann dadurch die Hauptversorgungsleitung unterbrochen werden, ohne dass der interne Mikroprozessor oder die Positionssensoren betroffen sind.
Bei einem Not-Halt lassen sich somit die gefahrbringende Spannung abschalten und alle Bewegungen anhalten, während die CAN-Kommunikation und die Positionsüberwachung unbeeinträchtigt weiter laufen.
Positionsschalter¶
Ein an den Antriebsverstärker der Drehachse angeschlossener induktiver Schalter kann für Referenzfahrten dieser Achse verwendet werden.
Aufgrund geringfügiger Abweichungen im Fertigungs- und Montageablauf unterscheiden sich die Referenzpositionen der OmniDriveModules minimal voneinander. Aus diesem Grund muss in der Steuerungssoftware für jedes Modul ein individuell einstellbarer Korrekturwert vorgesehen werden.
Tipp
Das gesamte Antriebssystem des Roboters funktioniert nur dann ordnungsgemäß, wenn alle Antriebsräder jederzeit korrekt ausgerichtet sind.
Digital- und Analog-I/Os¶
Jeder Antriebsverstärker bietet sechs digitale Eingänge, zwei digitale Ausgänge und einen analogen Eingang. Drei digitale Eingänge und ein digitaler Ausgang sind direkt über die Steckverbinder der Trägerplatine zugänglich. Unter Digitaleingänge und -ausgänge finden Sie die genaue Steckerbelegung. Einer der Eingänge wird für den Positionsschalter der Drehachse verwendet. Weitere Informationen über die Ein- und Ausgänge finden Sie auf der Website von Elmo Motion Control.
Programmierung¶
Jeder Antriebsverstärker enthält eine integrierte Logik, die einfache Anwenderprogramme ausführen kann. Mit dieser Funktion können einige grundlegende Funktionen von der Hauptsteuerungssoftware auf die Antriebsverstärker verlagert werden. Mögliche Funktionen sind:
- Automatische Referenzfahrt nach dem Einschalten
- Automatische Neuausrichtung der Antriebe nach Not-Aus
- Automatische Motorabschaltung nach einer vordefinierten Zeit der Inaktivität
Weitere Information finden Sie auf der Homepage von Elmo Motion Control.