

Product Description¶
The Neobotix OmniDriveModule is a two-axes drive unit for use in a mobile robot or a similar application.
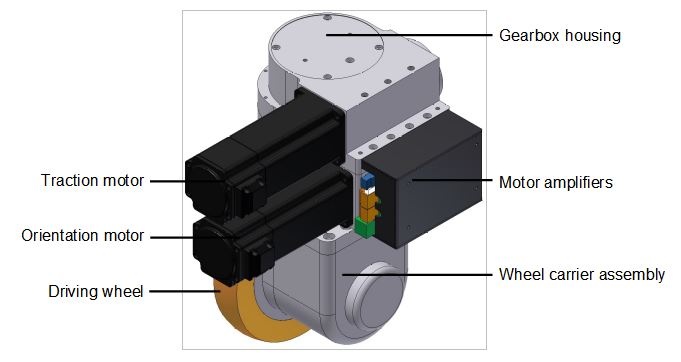
The module contains two high-performance servomotors with an industrial grade servo amplifier each (“Whistle 10/60” from Elmo Motion Control), mounted to a common printed circuit board. One of the motors drives the module’s driving wheel while the other motor rotates the wheel around its vertical axis. Both motors can rotate infinitely without mechanical boundaries, thus allowing an omnidirectional robot to move continuously and without the need to re-align the wheels due to any limits. The orientation drive features an inductive position switch which can be used for homing.
Due to the high transmission ratio of both worm gearings, no brake is required. This significantly reduces the module’s power consumption and heating. Fail-safe brakes can be integrated for additional safety.
Possible Drive Kinematics¶
The OmniDriveModules can be used to build several different drive kinematics according to the application’s requirements. Each configuration has its own advantages and disadvantages. The most commonly used configurations are the following:
1 OmniDriveModule with 2 fixed rollers¶
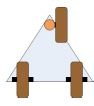
This configuration is the cheapest and easiest to control. Although possible, it is very rare that the OmniDriveModule is moved in a way that will make the fixed wheels jam.
In this configuration, true omnidirectional motion is not possible since the vehicle will always follow the drive unit.
3 OmniDriveModules¶
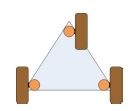
This configuration ensures high stability for smaller robots, avoids static indeterminacy and allows fully omnidirectional movement.
All three wheels must be aligned correctly at all times to avoid jamming or slippage. Please mind that the angle between the wheels must change according to the movement’s centre of rotation.
4 OmniDriveModules¶
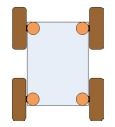
This configuration is most commonly used for service robots. It guarantees highest stability even for big and heavy robots. Although it is statically indeterminate this will not cause problems in most applications because all wheels are aligned actively.
All four wheels must be aligned correctly at all times to avoid jamming or slippage. Please mind that the angle between the wheels must change according to the movement’s centre of rotation.
Special Features¶
Logic Power Supply¶
The drive amplifiers of the OmniDriveModule feature a separate power supply pin for the internal logic unit. In case of an emergency stop the main power line can be cut without affecting the internal microcontroller or the motors’ feedback devices.
This means that during emergency stop all important functions of the drives (CAN-communication, position detection, etc.) are maintained even if the possibly dangerous power is switched off and motions are stopped.
Position Switch¶
An internal inductive position sensor is connected to the amplifier of the orientation drive and can be used for homing.
Due to variances in the assembly process the homing position may slightly differ from module to module. Therefore the control software must implement an adjustable offset for each orientation drive.
Tip
Proper functioning of the overall drive system can only be achieved by aligning all wheels correctly at all times.
Digital and Analogue I/Os¶
Each drive amplifier provides six digital inputs, two digital outputs and one analogue input. Three digital inputs and one digital output can be accessed via the PCB’s connectors. Please refer to Digital-I/Os for details. One of the inputs is used for the position switch of the orientation drive. Further information about the I/Os can be found on the Elmo Motion Control homepage.
Programming¶
Each drive amplifier contains an integrated logic capable of running simple user programs. This feature can be used to shift some basic functions from the main control software to the drive amplifiers. Possible functions are:
- Automatic homing after power on
- Automatic realignment of the drives after emergency stop
- Automatic motor off after a predefined time of inactivity
Details on the programming feature can be found on the Elmo Motion Control homepage.