

Funktionsweise¶
Grundlegende Funktionsweise¶
Das USBoard-USS5 misst die Laufzeit des Schallimpulses vom Sensor zum nächstgelegenen Hindernis und zurück. Aus der Laufzeit wird dann die Entfernung zum Hindernis berechnet.
Im Standardbetrieb werden die Sensoren nacheinander zyklisch abgefeuert und ausgewertet. Im Kreuzechomodus arbeiten jeweils Gruppen von bis zu vier Sensoren zusammen. Nur einer der Sensoren erzeugt den Ultraschallpuls, aber alle vier Sensoren können das Echo empfangen. Wenn die geometrische Position aller Sensoren bekannt ist, lässt sich dann die Position des erkannten Objekts ermitteln.
Die gemessenen Entfernungen können wahlweise zyklisch oder asynchron über CAN und / oder USB abgefragt werden. Auf Anfrage kann die USB-Schnittstelle auch durch RS-232 ersetzt werden.
Zur einfachen Verwendung als Kollisionsschutz können für jeden Sensor ein Warnbereich und ein Alarmbereich definiert werden. Wird bei mindestens einem Sensor die Warndistanz unterschritten, werden die entsprechende LED auf dem Board und ein Relaisausgang aktiviert. Eine zweite LED und ein weiterer Relaisausgang ermöglichen die Reaktion auf das Unterschreiten der Alarmdistanz. Warn- und Alarmbereiche werden komfortabel über die graphische Bedienoberfläche definiert und als Teil des Parametersatzes übertragen.
Warnung
Das USBoard-USS5 ist jedoch kein Sicherheitssystem und kann ausschließlich unterstützende, nicht sichere Daten liefern. Verwenden Sie das USBoard-USS5 niemals zur Absicherung von Gefahrenstellen.
Kreuzechomodus¶
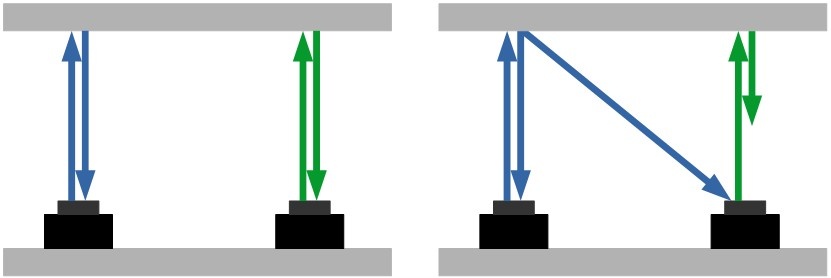
Im klassischen Direktechomodus sind die Sensoren unabhängig voneinander. In einer Dauerschleife arbeiten die Sensoren nacheinander, wobei jeder aktive Sensor einen eigenen Ultraschallpuls aussendet und anschließend auf das Echo wartet, aus dem die Entfernung zum Objekt berechnet wird (linkes Bild unten). Falls ein Sensor zufällig ein Echo vom Puls eines früheren Sensors empfängt, kann dies nicht erkannt werden und es kommt zu einer Fehlmessung (rechtes Bild).
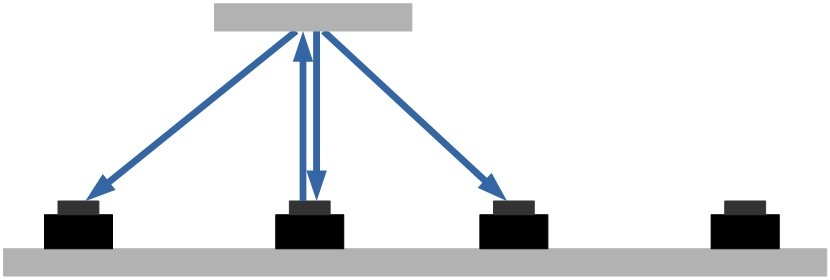
Im Kreuzechomodus dagegen sendet immer nur ein Sensor aus einer Vierergruppe den Ultraschallpuls aus aber alle vier Sensoren können das Echo empfangen. Aus den verschiedenen Schallaufzeiten vom Sender zum Objekt und zurück zu allen Sensoren können dann, wenn die Lage aller Sensoren zueinander bekannt ist, Rückschlüsse über die relative Position des erkannten Objekts gezogen werden.
Für die Positionsbestimmung des Objekts sind jedoch einige Aspekte zu beachten.
- Je nach Form und Oberfläche eines Objekts wird der Ultraschallpuls anders reflektiert, gestreut oder absorbiert. Es ist deshalb möglich, dass direkte Messungen im normalen Modus ein Objekt erkennen, die Kreuzechos aber zu schwach sind, um im Kreuzechomodus genutzt zu werden.
- Der reale Erfassungsbereich der Sensoren ist bei großen Reichweiten relativ schmal und zudem abhängig von Form und Material des Hindernisses. Es ist deshalb empfehlenswert, die Möglichkeiten des Kreuzechomodus vorab ausgiebig zu testen und sich mit den Eigenschaften und Fähigkeiten des USBoard-USS5 vertraut zu machen.
- Die auf dem USBoard-USS5 durchgeführte Entfernungsmessung ist in beiden Betriebsmodi identisch: die Schalllaufzeit wird halbiert und mit der Schallgeschwindigkeit multipliziert. Dies reduziert die Rechen- und Zykluszeit und vereinfacht den Datenaustausch. Bei relativ geringem Abstand zwischen den verwendeten Sensoren geben die Ausgabewerte in erster Näherung bereits einen guten Eindruck der Konstellation. Für eine exakte Berechnung auf Kundenseite müssen die Messwerte jedoch verdoppelt werden, um die komplette Distanz vom Sender zum Hindernis und weiter bis zum Empfänger zu erhalten.