

Operating Principle¶
Basic Principle¶
An ultrasonic sensor creates a sound pulse that is reflected by obstacles and then returns to the sensor. By measuring the time between emitting and receiving the ultrasonic pulse, the USBoard-USS5 is able to calculate the distance between the sensor and the closest obstacle.
In default mode the sensors are operated cyclically one after. In cross echo mode the sensors operate in groups of four. Only one of these sensors emits the pulse but all sensors can receive the echo. If the geometric positions of the sensors are know it is possible to triangulate the position of the detected obstacle.
A CAN and a USB communication interface can be used to acquire distance data measured by the sensors as well as the data from the analogue inputs. On request the USB port can be replaced by a RS-232 interface.
For each sensor a warning and an alarm distance can be defined by software. This allows using the board for collision protection. As soon as the distance measured by a sensor falls below the according warning distance, an LED on the board lights up and a relay is switched. A second LED and another relay indicate that an obstacle was detected within the alarm distance of one or more sensors. Warning and alarm distances are defined in the parameter set via the GUI.
Warning
The USBoard-USS5 is no safety system and can only provide supporting, non-safe information. Never use the USBoard-USS5 for safeguarding of dangerous areas or movements.
Cross Echo Mode¶
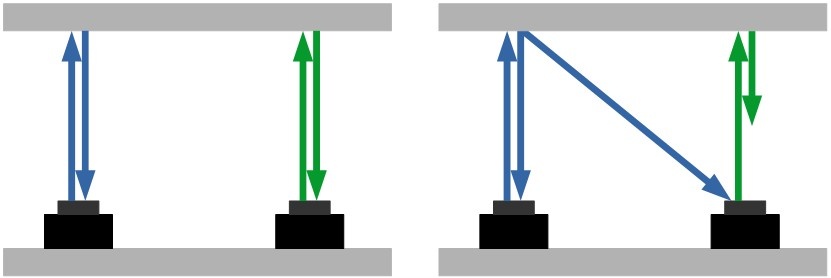
In the traditional, sequential operation mode the sensors are independent from each other. They operate in an infinite loop one after the other, with each sensor sending its own ultrasonic pulse and waiting for the echo to calculate the distance to the object (left picture below). If a sensor receives an echo from a pulse that was sent earlier by another sensor it will be treated like a regular echo, resulting in a faulty measurement (right picture).
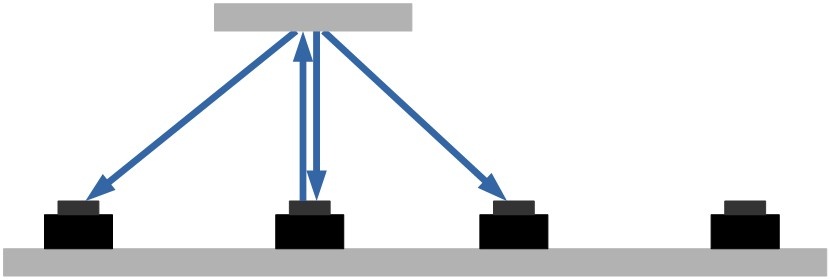
In cross-echo mode only one sensor of the group of four will send a pulse but all four sensors can receive the echo. If the positions of all sensors are known it is possible to estimate the location of the detected object based on the different durations it takes the echo to reach each sensor.
Several aspects should be kept in mind when calculating the object’s position.
- Depending on the shape and surface of an object the ultrasound pulse is reflected or absorbed differently. This is why some objects may be detectable with direct measurements in normal mode but do not create a sufficiently strong cross-echo.
- The realistic field of view of the sensors is rather limited at large distances and also dependent on form and material of the object. It is thus recommended to do some experiments and tests in cross-echo mode before setting up the actual application.
- The distance calulation performed by the USBoard-USS5 is the same in both operating modes: The time between sending and receiving the echo is halved and multiplied with the speed of sound. This reduces processing and cycle times and makes the data output easier. If the distance between the sensors of a cross-echo group is not too big this simplified calculation often provides usable results, despite being not perfectly accurate. For an exact triangulation please double the measurement output to get the total distance from the sending sensor to the obstacle and back to each sensor.