

Ladestationen¶
Induktive Wallbox¶
Allgemeine Hinweise¶
Alle ROX-Roboter und einige der älteren Robotertypen können über die induktive Ladestation Wallbox geladen werden. Dies ist sowohl für Roboter mit AGM-Akkus als auch mit LiFePO4-Akkus möglich. Die Ladestation arbeitet völlig verschleißfrei und die Ladekurve wird von der Robotersteuerung automatisch an den verwendeten Batterietyp angepasst. Damit eignet sie sich ideal für das Zwischenladen im laufenden Prozess, um die Arbeitszeit des autonomen Roboters zu maximieren.
Bemerkung
Der Wirkungsgrad ist beim induktiven Schnellladen von LiFePO4-Akkus deutlich höher und die Ladezeit erheblich kürzer als bei AGM-Akkus. Wir empfehlen deshalb ausdrücklich die Verwendung von LiFePO4-Akkus, wenn automatisches Laden über die induktive Ladestation gewünscht ist.
Warnung
Das kabelgebundene Ladegerät und die induktive Ladestation dürfen niemals zur gleichen Zeit verwendet werden! Trotz integrierter Schutzfunktionen in beiden Geräten könnte es sonst eventuell zu Schäden bis hin zur Zerstörung der Geräte oder des Roboters kommen.
Tipp
Um die induktive Ladestation nutzen zu können, muss der mobile Roboter eingeschaltet und betriebsbereit sein. Wenn der Roboter abgeschaltet ist, kann er nur über das kabelgebundene Ladegerät geladen werden.
Bitte berücksichtigen Sie dies bei der Planung Ihrer Anwendung.
Sicherheitshinweise¶
Die Neobotix Wallbox besitzt mehrere Sicherheitsfunktionen und ist sehr einfach aufzubauen und anzuschließen. Trotzdem müssen die folgenden Hinweise beachtet werden, um einen sicheren Betrieb der Wallbox zu ermöglichen.
Erhöhte Magnetfelder¶
Die ROX Wallbox verwendet starke elektromagnetische Felder, um die Ladeleistung zum mobilen Roboter zu übertragen. Um schädliche Auswirkungen auf Personen oder Tiere zu verhindern, dürfen sich während des Ladevorgangs keine Lebewesen in der Nähe der Spulen befinden. Der in den folgenden Abbildungen gelb markierte Bereich ist generell als Gefahrenbereich zu betrachten.


Gefahr
Beeinflussung von Herzschrittmachern!



Im Wirkungsbereich ist die Beeinflussung der Gerätefunktion eines Herzschrittmachers möglich. Die Störung eines Herzschrittmachers kann für deren Träger lebensgefährlich sein. Personen mit Herzschrittmacher oder metallischen Implantaten dürfen den Wirkungsbereich nicht betreten.
Warnung
Erhöhtes Magnetfeld!
Das erhöhte Magnetfeld kann für Lebewesen schädlich sein. Lebewesen dürfen sich während des Ladevorgangs nicht im Gefahrenbereich aufhalten. Insbesondere der Bereich unmittelbar zwischen den Robotern im Bereich der Spulen ist unbedingt frei zu halten, da sonst die zulässigen Expositionsgrenzwerte überschritten werden können!
Dieses elektromagnetische Feld tritt nur während des Ladevorgangs auf und wird automatisch abgebaut, wenn der Roboter das Laden beendet, von der Ladestation entfernt wird oder abgeschaltet wird. Das Feld geht ausschließlich von der Wallbox aus, der mobile Roboter kann selber kein Feld erzeugen.
Um ganz sicherzugehen, dass der Bereich um die Wallbox betreten werden kann, während sich gerade ein Roboter an der Station befindet, kann einfach das Stromkabel der Wallbox aus der Steckdose gezogen werden.
Erhöhte Temperaturen¶
Die Wallbox erreicht einen Wirkungsgrad, der mit herkömmlichen, kabelgebundenen Ladegeräten vergleichbar ist. Bei hohen Ladeleistungen treten effektiv trotzdem relativ hohe Verlustleistungen auf, die zu einer Erwärmung der Wallbox und des mobilen Roboters führen können. Insbesondere bei der Verwendung von AGM-Akkus, die nur niedrige Ladeströme verkraften, ist der Wirkungsgrad deutlich geringer und die Erwärmung merklich höher.
Warnung

Das Gehäuse der Wallbox und die Vorderseite des mobilen Roboters können eine erhöhte Temperatur aufweisen. Berühren Sie diese Teile nicht und lassen Sie vor Arbeiten am System alle Gehäuse abkühlen.
Installation¶
Mechanische Installation¶
Die ROX Wallbox besitzt vier Gummifüsse, die ihr einen sicheren Stand verleihen. Sie kann deshalb prinzipiell auch frei im Raum stehend verwendet werden. Um den Zugang in den oben beschriebenen Gefahrenbereich zu minimieren und um Stolperfallen ebenso zu vermeiden wie ein unbeabsichtigtes Verschieben der Wallbox, sollte sie jedoch möglichst an einer Wand aufgestellt und an ihr befestigt werden. Dazu besitzt die Wallbox einen Befestigungspunkt oberhalb der Verkleidung. Das Befestigungsmaterial ist nicht im Lieferumfang enthalten. Bitte achten Sie auf eine fachgerechte Montage.

Bei der Planung des Ladevorgangs und der Positionierung der Wallbox sollten folgende Punkte berücksichtigt werden:
- Die Wallbox aber vor allem auch ein ladender Roboter dürfen kein Hindernis darstellen oder zu Stolperstellen werden. Insbesondere Flucht- und Rettungswege müssen im vorgeschriebenen Umfang frei bleiben.
- Für die Anfahrt an die Wallbox benötigen die Roboter ausreichend freie Fahrstrecke vor dem Ladepunkt. Es sollte eine Anfahrtsstrecke gerade auf die Wallbox zu von mindestens 1 m geben, wenn möglich 1,5 m. Andernfalls kann es in unglücklichen Fällen passieren, dass der seitliche Versatz nicht ausreichend ausgeglichen werden kann und der Wirkungsgrad sinkt oder das Laden fehlschlägt.
- Der Ladevorgang erzeugt aufgrund der hohen Leistungen merkliche Abwärme. Die Wallbox sollte deshalb vorzugsweise in einer kühlen Umgebung mit ausreichend Luftzug aufgebaut werden. Direkte Sonneneinstrahlung, Abwärme von anderen Maschinen oder Luftstau sollten vermieden werden.
Elektrischer Anschluss¶
Das Netzkabel der Wallbox kann wahlweise links oder rechts aus dem Gehäuse geführt werden. Um ein Quetschen der Leitung zwischen Wand und Wallbox zu verhindern, kann das Kabel mit Hilfe eines Kabelsockels und eines Kabelbinders am inneren Profilrahmen der Wallbox befestigt werden. Falls das Kabel nicht wie im Auslieferungszustand bleiben kann und auf die gegenüberliegende Seite verlegt werden muss, gehen Sie wie folgt vor:
- Durchtrennen Sie den ursprünglich verwendeten Kabelbinder. Achten Sie dabei darauf, das Kabel nicht zu beschädigen!
- Führen Sie das Kabel innerhalb der Verkleidung und unterhalb des Elektronikgehäuses zur anderen Seite der Wallbox.
- Verwenden Sie den beigelegten zusätzlichen Kabelbinder, um das Kabel am Kabelsockel zu befestigen.


Die Wallbox kann an eine normale Steckdose angeschlossen werden. Wenn Verlängerungskabel verwendet werden müssen, dann müssen diese mindestens für die Nennleistung der Wallbox ausgelegt sein.

Die Wallbox ist ein Gerät der Schutzklasse I und erfordert einen Schutzleiteranschluss des Netzkabels.
Bemerkung
Verwenden Sie einen Sicherungsautomaten mit einem Nennstrom von 16 A und einer Spitzenstrombelastbarkeit von mindestens 10 kA.
Warnung
Im Falle eines Isolationsfehlers kann es zu einem Gleichstrom über den Schutzleiter kommen. Um in diesen Fällen einen Schutz gegen elektrischen Schlag zu garantieren, dürfen nur Fehlerstromschutzschalter bzw. RCDs vom Typ B verwendet werden. Außerdem darf außer der Wallbox kein anderes Gerät am selben RCD angeschlossen sein.
Ablauf des Ladevorgangs¶
Basisfunktion¶
Der grundlegende Ablauf beim induktiven Laden ist wie folgt.
Der Roboter wird im optimalen Abstand, wenige Millimeter vor der Ladestation positioniert.
Die übergeordnete Steuerung initiiert den Ladevorgang über einen softwareseitigen Befehl.
Die Verbindung zwischen Station und Roboter wird automatisch aufgebaut und der Ladevorgang beginnt. Der Roboter wird in den Lademodus geschaltet, in dem der Energieverbrauch minimiert ist und alle Bewegungen unterbunden werde. Der Roboter darf nicht zusätzlich über die Not-Halt-Tasten in den Not-Stopp versetzt werden!
Das Laden kann durch folgende Ereignisse und Maßnahmen unterbrochen werden:
Die Akkus sind voll geladen. Der Roboter erkennt das Ladeende, meldet es gegebenenfalls an die übergeordnete Steuerung und beendet entweder das Laden oder wechselt automatisch in den Erhaltungsmodus.
Das Laden wird über die Steuerung beendet. Dies kann nach Ablauf einer vordefinierten Zeit passieren oder wenn die laufende Anwendung einen bestimmten Zustand erreicht. Der Ladevorgang wird vom Roboter beendet und er wechselt wieder in den reinen Batteriebetrieb.
Eine der Not-Halt-Tasten am Roboter wird betätigt. In diesem Fall beendet der Roboter sofort den Ladevorgang. Er kann erst wieder fortgesetzt werden, nachdem die Taste entriegelt und der Not-Halt-Zustand zurückgesetzt wurde. Der Ladevorgang wird nicht automatisch fortgeführt, sondern muss von der Steuerung aktiv neu gestartet werden.
Bemerkung
Hierbei handelt es sich nicht um eine zertifizierte Sicherheitsfunktion. Sollten für Ihre Anwendung erhöhte Sicherheitsanforderungen gelten, wenden Sie sich bitte an Neobotix.
Der Roboter wird heruntergefahren oder abgeschaltet. In beiden Fällen wird das Laden automatisch beendet und kann erst wieder aufgenommen werden, wenn der Roboter erneut gestartet wurde und einsatzbereit ist.
Der Roboter wird mechanisch von der Ladestation entfernt. Das Ladesystem erkennt, wenn sich die Empfängerspule im Roboter zu weit von der Senderspule in der Station entfernt, und unterbricht dann automatisch den Ladevorgang. Das von der Ladestation ausgehende Magnetfeld wird sofort abgebaut und kann erst wieder hergestellt werden, wenn der Ladevorgang ordnungsgemäß neu gestartet wird.
Einfacher Automatikbetrieb¶
Für die einfachste Variante des automatischen Ladens muss die Wallbox ortsfest montiert sein und die exakte Roboterposition zum Laden muss einmal von Hand eingelernt werden. Diese Position sollte als Koordinatenpunkt hinterlegt oder als Station gespeichert werden.
- Der Roboter fährt diese Zielposition im Automatikmodus an und passt dabei auch die Fahrtparameter und Schutzfelder entsprechend an.
- Der Ladevorgang wird wie oben beschrieben gestartet.
- Der Roboter fährt von der Ladestation weg und nimmt den Betrieb wieder auf.
Bemerkung
Die Kollisionsfelder der Steuerung und die Schutzfelder der Laserscanner müssen angepasst werden, bevor der Roboter sehr dicht an die Wallbox heranfahren kann. Nach dem Abfahren von der Wallbox müssen sie wieder auf sichere Werte zurückgesetzt werden.
Es hat sich bewährt, die Anfahrt in drei Schritten zu realisieren, in denen der Roboter seine Position immer genauer bestimmt und die Positionierungsgenauigkeit steigert. In der mitgelieferten Software sind Beispiele für ein solches Vorgehen enthalten.
Vollautomatischer Betrieb mit Konturerkennung¶
Um die Einrichtung des automatischen Ladens zu vereinfachen und die Zuverlässigkeit des Ladevorgangs zu erhöhen, bietet Neobotix eine vollautomatische Lösung an, bei der die Wallbox automatisch erkannt und angefahren wird. Dadurch sind kleinere Verschiebungen der Wallbox, zum Beispiel durch Umbauten oder Reinigung, kein Problem mehr. Außerdem muss nicht für jede Wallbox die entsprechende Roboterposition individuell und millimetergenau ermittelt werden, was eine erhebliche Zeitersparnis bedeutet und Flüchtigkeitsfehler eliminiert.
Um das Laden mit Konturerkennung zu nutzen, muss die Wallbox ungefähr an der eigentlich vorgesehenen Position platziert werden. Die erlaubte Toleranz in Position und Drehung hängt von den Umgebungsbedingungen ab. Es muss ein Referenzpunkt für den Roboter definiert werden, hierfür empfehlen wir eine Stelle etwa 2 m vor der Wallbox. Der automatische Ablauf ist dann wie folgt:
- Der Roboter fährt die Referenzposition im Automatikmodus an.
- Die Automatikfunktion wird je nach Anwendungsaufbau durch einen Software-Aufruf gestartet.
- Der Roboter versucht nun, an der erwarteten Position die Kontur der Wallbox zu erkennen und führt automatisch eine Anfahrt in mehreren Schritten durch.
- Der Ladevorgang wird automatisch oder wie oben beschrieben durchgeführt.
- Je nach Anwendung dockt der Roboter automatisch ab und fährt zurück zur Referenzposition.
- Der normale Betrieb kann wieder aufgenommen werden.
Tipp
Die Konturerkennung kann bei Bedarf auch für andere Formen und Anwendungen verwendet werden. Bitte sprechen Sie uns bei Interesse an.
Technische Daten und sonstige Informationen¶
Abmessungen¶

| Eigenschaft | Einheit | Wert |
|---|---|---|
| Maximaler Abstand zwischen Sender- und Empfängerspule | mm | 30 |
| Maximaler Abstand zwischen Standard ROX und Wallbox | mm | 15 |
| Maximaler seitlicher Versatz zwischen den Spulen | mm | 30 |
| Nominaler Wirkungsgrad | 93% | |
| Versorgungsspannung | V (AC) | 220-240 |
| Frequenz der Versorgungsspannung | Hz | 50-60 |
| Nennleistung des Systems | W | 2800 |
| Nennstrom der Sicherung | A | 16 |
| Fehlerstrom-Schutzschalter-Type | B |
Entsorgung¶

Defekte und ausgediente Elektrogeräte dürfen nicht über den Hausmüll entsorgt werden sondern müssen zur Wiederverwendung oder Verwertung bei getrennten Sammelstellen abgegeben werden.
Wenn Sie Ihre alte Neobotix-Wallbox nicht selbst entsprechend abgeben können oder wollen, übernimmt Neobotix dies gerne für Sie. Sie können Ihre Neobotix-Wallbox einfach bei uns abgeben oder Sie uns per Post oder Spedition schicken. Alternativ können wir sie bei Ihnen abholen lassen oder Ihnen einen Versandaufkleber für die kostenfreie Rücksendung zukommen lassen.
Weitere Informationen und Kontaktdaten finden Sie auf unserer Website.
Rechtliche Anmerkungen¶
Die allgemeinen rechtlichen Anmerkungen finden Sie unter Rechtliche Anmerkungen.
EU-Konformitätserklärung¶

Hiermit bestätigt Neobotix, dass das beschriebene Produkt die relevanten EU-Richtlinien erfüllt.
Informationen zu RoHS¶

Hiermit bestätigt Neobotix, dass das beschriebene Produkt die RoHS-Richtlinien 2011/65/EU (RoHS 2) und 2015/863/EU des Europäischen Parlaments und des Rates zur Beschränkung der Verwendung gefährlicher Stoffe in Elektro- und Elektronikgeräten erfüllt.
Automatische Ladestation¶
Die automatische Ladestation ist ausgesprochen robust und lässt sich sehr leicht aufbauen und in das Programm des Roboters einbinden.
Um ein schnelles und problemloses Andocken zu ermöglichen, ist ein gewisser Freiraum rund um die Ladestation nötig. Wählen Sie einen Platz, der leicht vom Roboter angefahren werden kann und in dem weder der ladende Roboter noch die Station selbst jemanden behindern können. Zum Anschluss des Ladegerätes muss zudem eine Steckdose in der Nähe vorhanden sein.
Bitte beachten Sie bei der Wahl des Standortes die folgenden Punkte:
- Um die Ladekontakte auf die richtige Höhe zu bringen, muss die Unterkante der Trägerplatte der Ladestation direkt auf dem Boden aufsitzen.
- Die Ladestation muss an einer stabilen Wand befestigt werden. Bitte wenden Sie sich an Neobotix, falls Sie eine freistehende Station benötigen.
- Die Ladestation muss mittig am Ende einer mindesten 1,0 m breiten, freien Anfahrstrecke montiert werden.
- Bei Verwendung von mehreren Ladestationen sollte ein Raster von ebenfalls mindestens 1,0 m eingehalten werden.
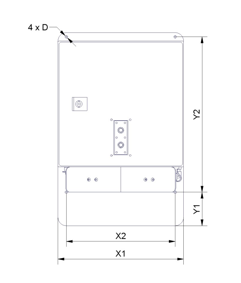
Abmessungen¶
Die Abmessungen der Ladestation sind je nach Roboter unterschiedlich. Die Abmessungen finden Sie in der Tabelle unten:
| Roboter | X1 | X2 | Y1 | Y2 | D |
|---|---|---|---|---|---|
| MP-400 | 300 | 260 | 80 | 370 | 6.6 |
| MP-500 | 300 | 260 | 110 | 360 | 6.6 |
| MPO-700 | 300 | 260 | 192 | 370 | 6.6 |
| MPO-500 | 340 | 320 | 40 | 290 | 6.6 |
Nach der Installation¶
Prüfen Sie nach der Montage der Ladestation, ob sich die Ladekontakte auf der richtigen Höhe befinden und ob der Roboter die Station ohne Probleme anfahren kann.
Achtung
Schließen Sie das Stromkabel der Ladestation erst nach erfolgreicher Kontrolle dieser beiden Punkte an. Die Ladestation benötigt die gleiche Stromversorgung wie das externe Ladegerät.
Um einen automatischen Ladevorgang zu ermöglichen, muss das integrierte Ladegerät permanent eingeschaltet sein. Trotz der offen liegenden Kontakte, an die der Roboter andockt, besteht keine Gefahr von elektrischen Schlägen oder Kurzschlüssen. Das Ladegerät verfügt über einen integrierten Kontrollmechanismus, der ständig die Verbindung zur Batterie prüft und erst nach erfolgreicher Erkennung einen Strom fließen lässt.
Bemerkung
Im normalen Betrieb sind die Ladekontakte des Roboters über ein Starkstromrelais von der Batterie getrennt und führen keine Spannung. Um die automatische Ladestation nutzen zu können, muss dieses Relais per Software geschaltet werden.
Achtung
Um den Verschleiß der elektrischen Komponenten zu minimieren sollte der Ladevorgang erst unterbrochen werden, wenn die Batterien voll geladen sind und der Ladestrom zurückgegangen ist.
Externe Batterie-Ladestation¶
Wenn der Roboter mit dem Akku-Schnellwechselsystem ausgestattet ist, kann der gerade nicht benutzte Akkusatz in einer externen Akkuladestation aufgeladen werden.
Stellen Sie die Ladestation auf den Boden und achten Sie darauf, dass sie nicht verrutschen kann. Die Station kann entweder direkt vor einer Wand platziert oder auf dem Boden verschraubt werden.
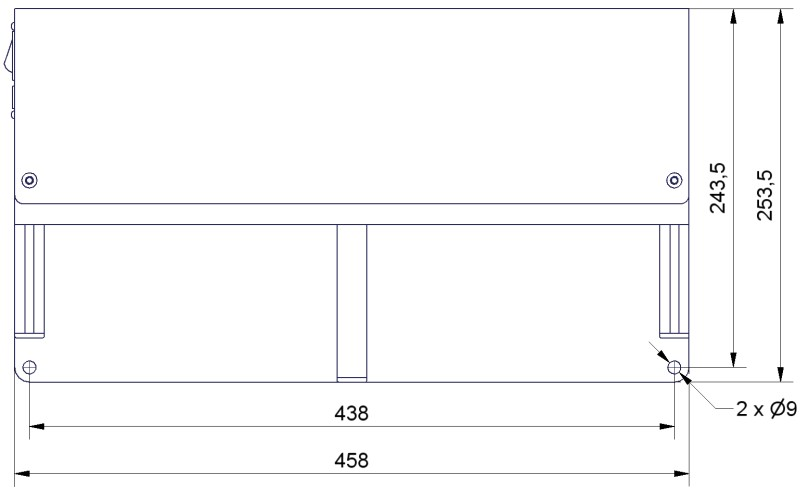
Abmessungen der Ladestation
Vergewissern Sie sich, dass der Wahlschalter für die Eingangsspannung richtig eingestellt ist, und schließen Sie die Ladestation dann an eine normale Steckdose an. Vergewissern Sie sich vor dem Einlegen von Batterien immer, dass das integrierte Ladegerät ausgeschaltet ist. Der Hauptnetzschalter befindet sich direkt neben dem Netzkabelanschluss.
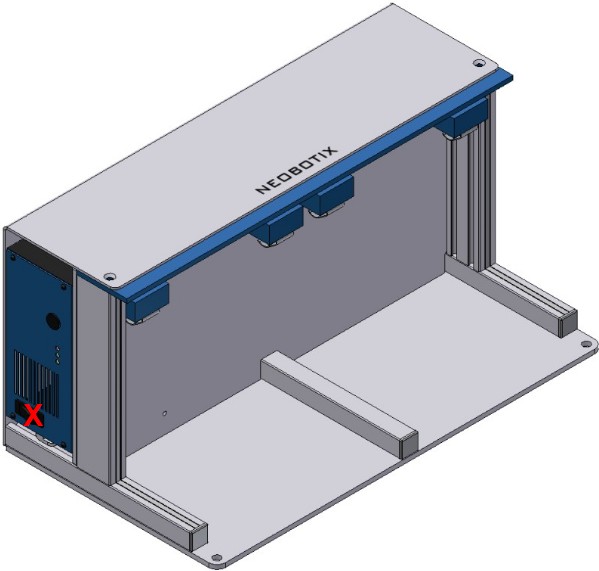
Position des Netzschalters (X)
Die Akkus können nur als kompletter Satz von zwei identischen Akkus mit demselben Ladezustand geladen werden. Legen Sie die Akkus mit den Griffen nach oben und den Akku-Kontakten zur Rückseite der Station hin auf die Grundplatte der Station zwischen die Aluminiumprofile. Schieben Sie dann die Akkus langsam in die Station, bis sie die vertikale Platte berühren und mit der Vorderseite der Station bündig sind.
Die grüne LED an der Seite des Batterieladegeräts leuchtet konstant, wenn die Batterien vollständig geladen sind. Sie können in der Ladestation bleiben, bis sie gebraucht werden.