

Mechanische Eigenschaften¶
Abmessungen¶
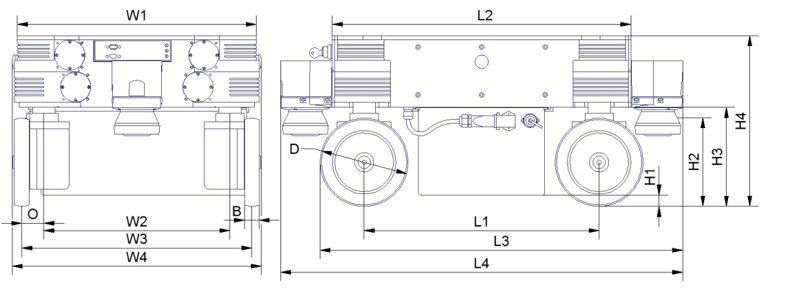
Abmessungen des MPO-700
| Beschreibung | Symbol | Wert (mm) |
|---|---|---|
| Breite der Deckplatte | W1 | 488 |
| Breite der Antriebskonfiguration | W2 | 380 |
| Empfohlene Spurweite | W3 | 470 |
| Breite der Plattform | W4 | 509 |
| Breite der Plattform mit diagonalen Scannern | W4’ | 656 |
| Versatz der Antriebsräder | O | 45 |
| Breite der Antriebsräder | B | 30 |
| Durchmesser der Antriebsräder | D | 180 |
| Radstand der Antriebskonfiguration | L1 | 480 |
| Länge der Plattform | L2 | 610 |
| Gesamtlänge mit einem Laserscanner | L3 | 741 |
| Gesamtlänge mit zwei Laserscannern | L4 | 822 |
| Gesamtlänge mit zwei diagonalen Laserscannern | L4’ | 756 |
| Bodenfreiheit mit Batterie | H1 | 23 |
| Höhe der Scanebene | H2 | 181 |
| Bodenfreiheit ohne Batterie | H3 | 202 |
| Höhe der Deckplatte | H4 | 348 |
Absolute Grenzwerte¶
Warnung
Ein Überschreiten dieser Grenzwerte kann zu Fehlfunktionen führen oder den Roboter beschädigen!
| Beschreibung | Einheiten | Wert |
|---|---|---|
| Lagertemperatur | °C | -20 .. +50 |
| Betriebstemperatur (Umgebungstemperatur) | °C | +0 .. +25 |
| Traglast | kg | 400 |
| Höchstgeschwindigkeit | m/s | 0.9 |
| Maximale Schwelle zum Überfahren (≤ 0.25m/s) | mm | 15 |
| Maximale Schwelle zum Überfahren (Höchstgeschwindigkeit) | mm | 5 |
Sensorpositionen¶
Alle Abstände sind in Millimetern angegeben, gemessen relativ zum Koordinatensystem der Plattform. Alle Winkel sind in Grad, gemessen mathematisch positiv gegen die Fahrtrichtung.
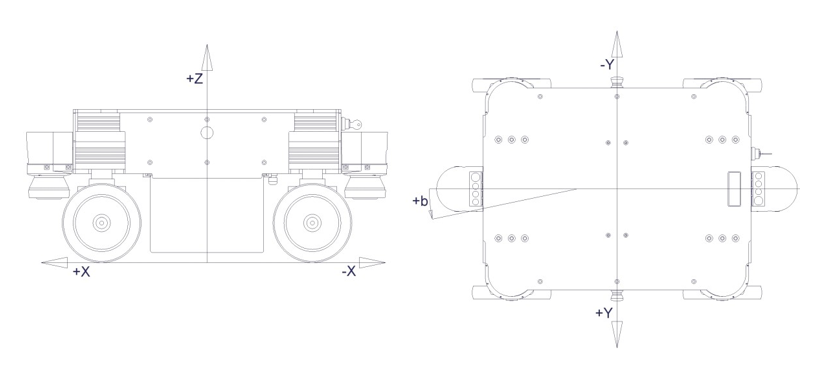
Koordinatensystem des MPO-700
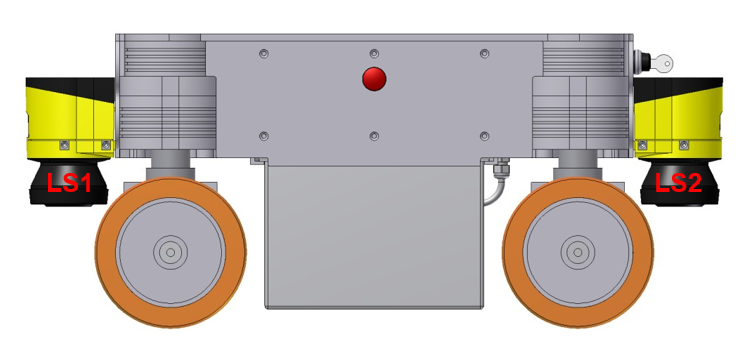
Scannerpositionen
| Sensor | Symbol | X-pos. | Y-pos. | Z-pos. | b-angle |
|---|---|---|---|---|---|
| Laserscanner vorne mittig | LS1 | 360 | 0 | 181 | 0 |
| Laserscanner hinten mittig | LS2 | -360 | 0 | 181 | 180 |
| Laserscanner vorne links | (Option) | 327 | 277 | 201,5 | 45 |
| Laserscanner hinten rechts | (Option) | -327 | -277 | 201,5 | 225 |
Elektrische Kennwerte und sonstige Daten¶
Eigenschaften der internen Komponenten¶
Alle Daten entstammen den entsprechenden Datenblättern.
| Beschreibung | Einheiten | Wert |
|---|---|---|
| Motorleistung | W | 400 |
| Nenndrehzahl | rpm | 3000 |
| Nennmoment der Motoren | Nm | 1.27 |
| Maximales Moment der Motoren | Nm | 2.32 |
| Encoderauflösung | Inkremente / Umdr. | 10000 |
| Getriebeuntersetzung der Drehachse | 1 | 19:1 |
| Getriebeuntersetzung der Fahrachse (1. Stufe) | 1 | 15:1 |
| Getriebeuntersetzung der Fahrachse (2. Stufe) | 1 | 2:1 |
| Nennspannung der Batterien | V | 48 |
| Maximale ungeregelte Spannung | V | 59 |
| Batteriekapazität | Ah | 28 |
Sonstige Eigenschaften¶
| Beschreibung | Einheiten | Wert |
|---|---|---|
| Gewicht | kg | 142 |
| Voraussichtliche Arbeitszeit | a | 10 |
Kommunikation mit internen Komponenten¶
RelayBoard¶
Die Kommunikation zwischen dem Neobotix RelayBoard und dem Bordrechner erfolgt über eine USB-Verbindung. Details zum RelayBoard und zum verwendeten Protokoll finden Sie in der Dokumentation zu dieser Platine (erhältlich auf Anfrage).
Antriebsverstärker¶
Alle Antriebsverstärker und der Bordrechner sind an den selben CAN-Bus angeschlossen und kommunizieren mit einer Datenrate von 1MBaud. Eventuell kann es erforderlich sein, die Kommunikationseinstellungen der Antriebsverstärker an die verwendete Steuerungssoftware anzupassen.
Über die Konfigurations-Software „Composer“ von Elmo Motion Control können alle Motorverstärker konfiguriert, getestet und optimiert werden. Dazu kann jeder Verstärker mit einem Konfigurationskabel mit dem COM-Port (57600 Baud, keine Parität) eines Rechners verbunden werden, auf dem der „Composer“ läuft. Bitte kontaktieren Sie Neobotix, wenn Sie die Einstellungen der Verstärker anpassen möchten.
Die Handbücher zu den Antriebsverstärkern „Whistle“ WHI 10-60 und die jeweils aktuellste Version des Composers können von der Homepage von Elmo Motion Control heruntergeladen werden. Eine kurze Einleitung in die Konfiguration der Verstärker finden Sie hier.
Die Verstärker kommunizieren über das CANopen-Protokoll. Die Node-IDs sind wie folgt vergeben. Alle Verstärker sind auf Group-ID 30 eingestellt.
| Modul | Lage | Node-ID Drehantrieb | Node-ID Fahrantrieb |
|---|---|---|---|
| A2 | Vorne links | 2 | 1 |
| A3 | Hinten links | 4 | 3 |
| A4 | Hinten rechts | 6 | 5 |
| A5 | Vorne rechts | 8 | 7 |
Steckverbinder¶
Siehe Kapitel Steckverbinder.