

Bedienelemente¶
Die folgenden Abbildungen zeigen die Standardbedienelemente der ROX-Plattformen. Individuelle Änderungen sind gegebenenfalls in der projektspezifischen Dokumentation beschrieben.
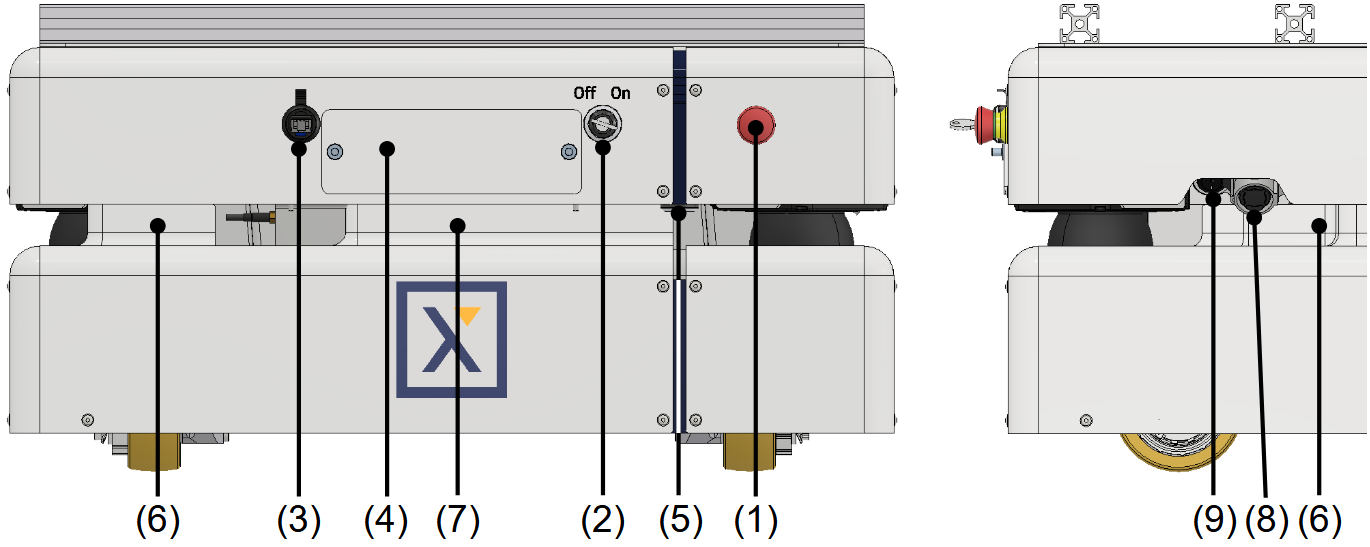
| 1 | Not-Halt-Tasten |
| 2 | Schlüsselschalter |
| 3 | Ethernet-Anschluss |
| 4 | Zugang zum Bordrechner |
| 5 | Bremsen-Löse-Taste (außer bei Version Argo) |
| 6 | LED-Beleuchtung |
| 7 | Typenschild |
| 8 | Ladebuchse |
| 9 | Akku-Aktivierungsschalter |
Not-Halt-Tasten¶
Durch Drücken einer der Not-Halt-Tasten wird der Roboter sofort stillgesetzt und alle weiteren Bewegungen verhindert. Zum Rücksetzen des Sicherheitssystems müssen alle betätigten Not-Halt-Tasten durch Drehen im Uhrzeigersinn entriegelt und der Schlüsselschalter für ca. eine Sekunde nach rechts gedreht werden.
Schlüsselschalter¶
Sehen Sie dazu Schlüsselschalter.
Ethernet-Anschluss¶
Diese Buchse bietet einen direkten Zugang zum internen Netzwerk des mobilen Roboters. Über sie kann unter anderem auch die Sicherheitssteuerung erreicht und anwendungsspezifisch programmiert werden.
Zugang zum Bordrechner¶
Alle Anschlüsse des Standard-Bordrechners sind von außen zu erreichen.
Bremsen-Löse-Taste¶
Mit dieser Taste können die Bremsen alle Fahrantriebe auch bei abgeschaltetem Roboter manuell gelüftet werden, um den Roboter zu verschieben. Solange die Bremsen bei abgeschaltetem Roboter gelüftet sind, leuchten rote Warnleuchten an der vorderen rechten und der hinteren linken Ecke der Plattform.
Das Sicherheitssystem des ROX überwacht den Zustand der Bremsen und geht automatisch in den Not-Halt-Zustand, wenn die Bremsen manuell gelüftet wurden. Das Rücksetzen des Not-Halts und ein aktives Verfahren des Roboters sind erst möglich, wenn die Bremsen wieder geschlossen sind.
LED-Beleuchtung¶
Sehen Sie dazu LED-Beleuchtung.
Bemerkung
Die LED-Beleuchtung des ROX zeigt auch Fehlerzustände an und erfüllt damit eine wichtige Sicherheitsfunktion. Um sicherzustellen, dass die LEDs korrekt funktionieren, sollte der Roboter mindestens einmal pro Woche neu gestartet und dabei geprüft werden, dass der hier beschriebene Farbwechsel unverändert alle Farben durchläuft.
Ladebuchse¶
Hier kann das Batterieladegerät angeschlossen werden. Nähere Informationen finden Sie unter Ladevorgang.
Akku-Aktivierungsschalter¶
Wenn LiFePO4-Akkus verwendet werden, besitzt der ROX einen Wippschalter, mit dem die Akkus in Standby-Modus versetzt werden können.
Das in die LiFePO4-Akkus integrierte Batteriemanagementsystem (BMS) überwacht fortwährend den Zustand der Akkus und verhindert Über- und Tiefentladung ebenso wie Schäden durch Überhitzung, Überstrom und ähnliches. Dazu benötigt es jedoch Energie, die über längere Zeit hinweg die Akkus in einem abgeschalteten Roboter entladen würde. Im Standby-Modus ist dieser Energiebedarf deutlich reduziert und der Roboter kann auch mehrere Wochen ohne erneutes Aufladen überstehen. Allerdings sind in diesem Modus die Ausgänge der Akkus spannungsfrei geschaltet und die Akkus können weder geladen noch kann der Roboter eingeschaltet werden.
Tipp
Schalten Sie die Akkus des ROX immer in den Standby-Modus, wenn der Roboter voraussichtlich mehrere Tage lang nicht verwendet werden wird oder bereits weitgehend entladen ist und nicht zeitnah wieder geladen werden kann.
AGM-Akkus stehen immer unter Spannung und können nicht deaktiviert werden.